Project participants: Josh Bongard, Victor Zykov, and Hod Lipson (see team picture). Please mention all team members when covering this work. Thank you.
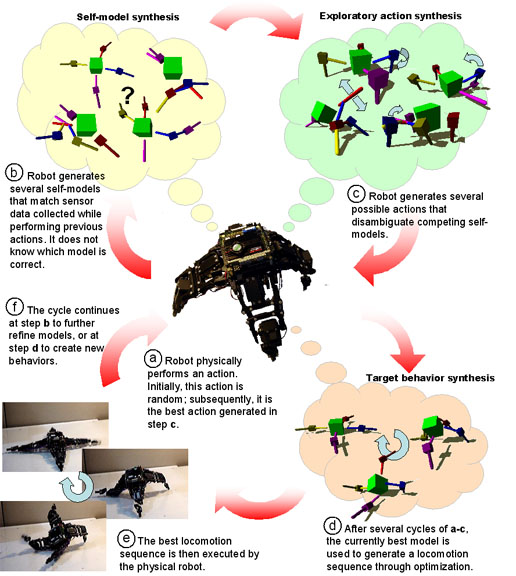
Higher animals use some form of an "internal model" of themselves for planning complex actions and predicting their consequence, but it is not clear if and how these self-models are acquired or what form they take. Analogously, most practical robotic systems use internal mathematical models, but these are laboriously constructed by engineers. While simple yet robust behaviors can be achieved without a model at all, here we show how low-level sensation and actuation synergies can give rise to an internal predictive self-model, which in turn can be used to develop new behaviors. We demonstrate, both computationally and experimentally, how a legged robot automatically synthesizes a predictive model of its own topology (where and how its body parts are connected) through limited yet self-directed interaction with its environment, and then uses this model to synthesize successful new locomotive behavior before and after damage. The legged robot learned how to move forward based on only 16 brief self-directed interactions with its environment. These interactions were unrelated to the task of locomotion, driven only by the objective of disambiguating competing internal models. These findings may help develop more robust robotics, as well as shed light on the relation between curiosity and cognition in animals and humans: Creating models through exploration, and using them to create new behaviors through introspection. Watch a movie here.
Higher animals use some form of an "internal model" of themselves for planning complex actions and predicting their consequence, but it is not clear if and how these self-models are acquired or what form they take. Analogously, most practical robotic systems use internal mathematical models, but these are laboriously constructed by engineers. While simple yet robust behaviors can be achieved without a model at all, here we show how low-level sensation and actuation synergies can give rise to an internal predictive self-model, which in turn can be used to develop new behaviors. We demonstrate, both computationally and experimentally, how a legged robot automatically synthesizes a predictive model of its own topology (where and how its body parts are connected) through limited yet self-directed interaction with its environment, and then uses this model to synthesize successful new locomotive behavior before and after damage. The legged robot learned how to move forward based on only 16 brief self-directed interactions with its environment. These interactions were unrelated to the task of locomotion, driven only by the objective of disambiguating competing internal models. These findings may help develop more robust robotics, as well as shed light on the relation between curiosity and cognition in animals and humans: Creating models through exploration, and using them to create new behaviors through introspection. Watch a movie here.

{kind=link}